使用智能手机制作手势控制机器人手机机器人「使用智能手机制作手势控制机器人」
使用传统控制器控制机器人,无论是手持控制器还是智能手机中的虚拟控制器,都已成为主流。我们向前迈出一步(或两步?)并使用一些不同的东西怎么样,比如手势?听起来不错?嗯,那就这么定了!我们将使用智能手机控制我们的机器人;不是通过点击一些按钮,而是通过移动我们的手!你问这怎么可能?在我们友好的图形编程软件 PictoBlox 和我们最先进的项目制作移动应用程序 Dabble 的帮助下。
让我们开始!
硬件:
- 生机勃勃
- HC05蓝牙模块
- 直流电机
- 车轮
- 电机支架
- 脚轮
- 螺母和螺栓
- 跨接电缆
软件应用:
- PictoBlox公司
- 玩水
上述所有组件都可以在STEMpedia 入门包中找到。
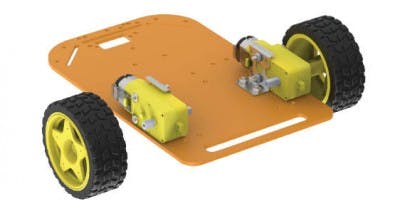
因为我想通过我的手势来控制一些东西。我将使用 evive 制作一个基本的两轮驱动机器人。
让我们先组装它。
拿起底板并在其上安装两个电机支架。在支架上,安装直流电机。
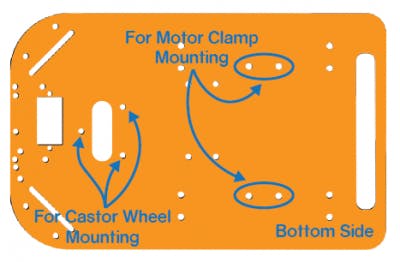
将轮子连接到直流电机。
任何车辆都需要至少三个支撑才能静止不动。因此,我们需要添加第三个支撑,即脚轮。

如上图所示安装它。
完成后,如图所示,使用 M3 螺母和螺栓将 evive 安装在顶部。

将蓝牙模块连接到它上面,以便机器人可以与您的智能手机通信。

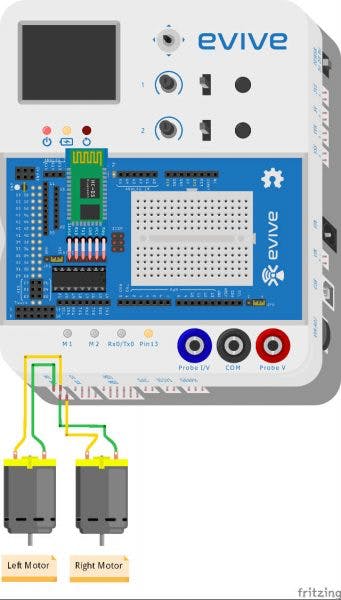
如图所示进行连接:
将蓝牙模块连接到蓝牙支架引脚,将直流电机连接到 evive 的电机通道 M1 和 M2。
PictoBlox 是一款基于 Scratch 3.0 的图形化编程软件,可以让学习编程变得简单有趣。它允许您连接和控制 evive 与您的计算机,甚至可以将代码上传到它。
您可以从这里下载 PictoBlox 。
上传以下脚本到evive:

首先,在您的智能手机中打开 Dabble。然后,连接蓝牙。选择电话传感器模块。
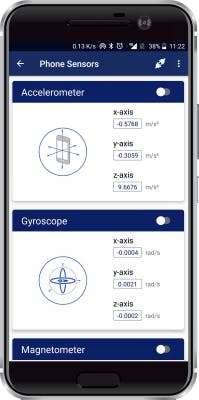
您会在该模块中找到许多传感器,例如加速度计、陀螺仪、磁力计、接近度计、光度计、声音计、位置、温度和气压计。您还会注意到,这些传感器显示的是它们测量的量值。在这个项目中,我们将使用加速度计。拨动与之对应的开关。这样做时,正在测量的数据将发送到与您的汽车相连的 evive。
当我们向前或向后倾斜手机时,沿 X 轴的加速度会发生变化。如果沿 X 轴的加速度超过 3 m/s2,则机器人将向前移动。如果低于 -3 m/s2,则机器人向后移动。
如果我们向左或向右倾斜手机,沿 Y 轴的加速度会发生变化。如果沿 Y 轴的加速度超过 3 m/s2,则机器人向左移动。如果低于 -3 m/s2,则机器人将向正确的方向移动。
如果沿两个轴(即 X 轴和 Y 轴)的加速度在 -3 m/s2 和 3 m/s2 之间,则机器人不会移动。
有了这个,您的机器人就可以捕捉到您最轻微的手势并向您报告!
附言。由于反应热烈,我们决定延长 Indiegogo 活动,即将结束!所以,如果你到现在还没有时间看,现在就去看看吧!
图木舒克版权声明:本网信息来自于互联网,目的在于传递更多信息,并不代表本网赞同其观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,并请自行核实相关内容。本站不承担此类作品侵权行为的直接责任及连带责任。如若本网有任何内容侵犯您的权益,请及时联系我们,本站将会在24小时内处理完毕,E-mail:xinmeigg88@163.com